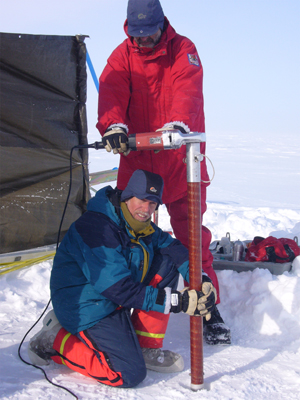
 Coring at the summit of Austfonna (photo T. Dunse)
Coring at the summit of Austfonna (photo T. Dunse)
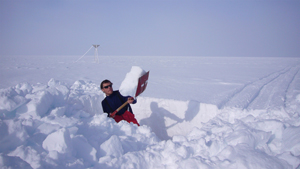 Snow pits & profiles (photo T. Dunse)
Snow pits & profiles (photo T. Dunse)
 Stake measurements (photo T. Dunse)
Stake measurements (photo T. Dunse)
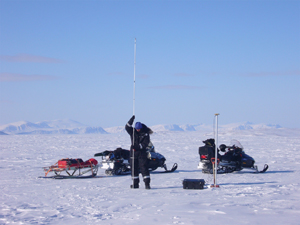
 GPS and Radar profiling (photo T. Dunse)
GPS and Radar profiling (photo T. Dunse)
Existing data sets
Bed and surface topography was mapped by airborne radar soundings in the 1980s. The present DEM for Austfonna is constructed from existing maps, aerial photos, satellite data, and surface topography from the radar work. Some thermal data were obtained from a deep ice core drilled by Soviet scientists in the 1970s. In 1998 and 1999 UiO/NPI mapped snow accumulation and used Chernobyl fallout as a reference horizon in ice cores to determine long-term mass balance. In 2004 and 2005 UiO/NPI established a stake net, measured elevation profiles using GPS, and snow stratigraphy from GPR data in a CalVal project for CryoSat I. NASA made airborne laser profiles over the ice cap and other parts of Svalbard in 1996 and 2002.
Field Investigations
UiO (Hagen), NPI, UMB, UNIS, NORUT, IGRAS (IMAU, UB, SPRI, UMa)
1) Surface mass balance. Data will be collected along profiles established in 2004. Snow accumulation will be mapped using GPR along existing and additional profiles. Net accumulation since the 1986 Chernobyl accident will be obtained from shallow cores.
2) Energy balance studies. Automatic Weather Stations (AWS) will be installed at three elevations, following a transect from south-west to the summit. Temperature loggers will be placed in several elevations to obtain air temperature gradients.
3) Superimposed ice studies. Internal accumulation and superimposed ice formation will be quantified using shallow cores and in experimental studies.
4) Temperature regime. Snow/ice temperature will be measured at some locations close to the AWS sites. Internal ice temperature conditions (spatial distribution of the cold/temperate ice interface) will be mapped by HF GPR (200-400 MHz)9. Different systems will be used: a new multi-frequency system developed at UiO (Hamran), a Russian LF system by IGRAS, and a Malå-RAMAC GPR.
5) Ice surface topography. This will be measured by ground-based GPS, airborne laser scanning (by airplane and Unmanned Air Vehicles, UAV) and from satellite data. Ground-based data gives high accuracy, and will act as quality control for more comprehensive airborne data, which will extend into inaccessible crevassed areas close to the calving coast. Further laser scanner measurements and high resolution imagery will focus on exit zones to determine calving flux. A new C-band GPR onboard the UAV will be used to improve spatial coverage of the radar measurements and map the entire ice cap accumulation and superimposed ice distribution. Airborne C-band measurements will also be correlated to C-band SAR satellite data for mapping of glacier facies.
6) Bed topography will be mapped by airborne and ground-based low frequency radars to refine the existing data obtained by SPRI airborne survey in 1985. Russian scientists have specialized in developing suitable LF-radar for this purpose and will participate in the field.
7) Glacier velocity and calving flux. Surface velocity vectors will be measured by static GPS giving average values over measurement interval. In addition, a minimum of 10 permanent GPS receivers/loggers will be deployed at some localities to obtain continuous velocity records.