
The soft robots in these projects will mainly be voxel-based soft robots like the ones seen in the image above. Several studies have demonstrated that evolutionary algorithms can be useful in optimizing the body shape and control of such robots, both in 2D and 3D. Below are some suggested research directions for the optimization of soft voxel-based robots.
- Coevolution of brains and bodies. Evolutionary algorithms are able to optimize both robot bodies and the brains (e.g. neural networks) controlling them. By optimizing brains and bodies together, efficient solutions may be found that actively use the robot's body to simplify the job of the brain. For instance, to cross difficult obstacles, a simple solution could be to just build a bigger robot, instead of developing sophisticated climbing abilities. An exciting possibility is to extend this coevolution by also evolving the robot's environment. Evolving environments and robots together can potentially help gradually improve the abilities of evolving robots by giving them harder and harder environmental challenges. The recently developed EvoGym could be useful for exploring the evolution of brains and bodies of voxel-based robots.
- Predicting performance from robot morphology. When evolving robots to perform some task, we have to spend a lot of time evaluating robots - also those that we could tell would fail just by looking at them. Can we use a Machine Learning model to remove some of these failing robots just by looking at them, avoiding expensive evaluation? Going even further, perhaps we could also say something about the quality of successful robots? Or to say something about which task a given robot may be suitable for (e.g. "I think this robot can jump, but it can't run."). It can be interesting to look into both models you train yourself, perhaps with pictures of robots as inputs and fitness values as target - and pre-trained models like GPT-4. Could it already contain the relevant intuitions about robot bodies?
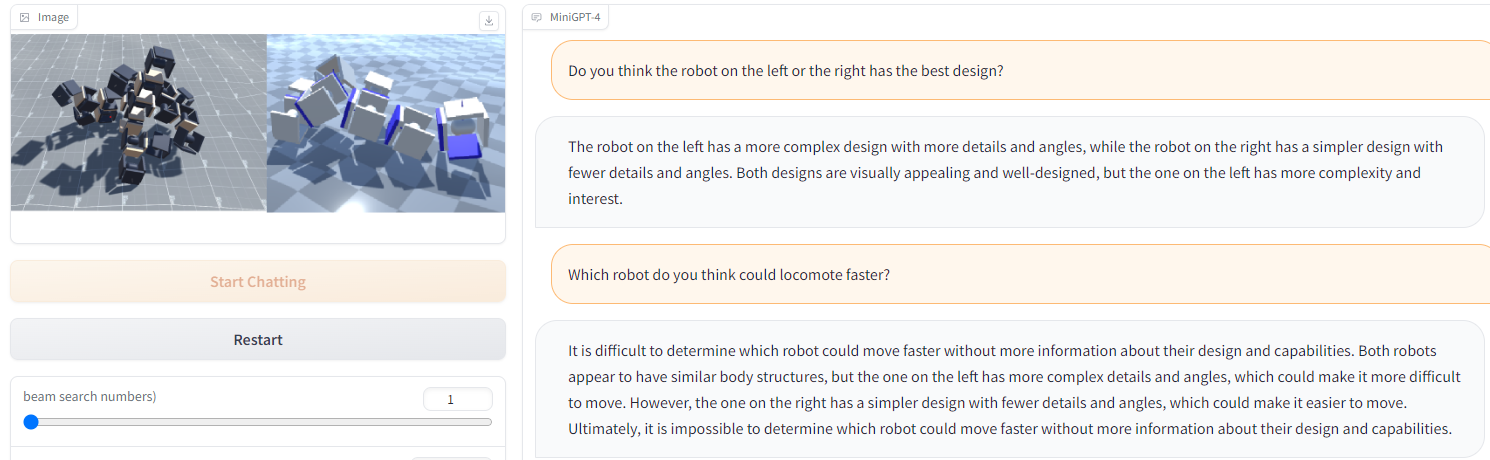
Example of GPT-4 evaluating a robot design. Can we train an Machine Learning model to do better? - Neural Cellular Automata for robot bodies and brains. A recent paper proposed that voxel-based robots can have both their bodies and control optimized by the use of Neural Cellular Automata (NCAs). The evolved robots were able to solve simple tasks in a simulated environment - but can we make them do more complex things, such as delivering an object to a target location? A way towards that could be to apply curriculum learning, where an agent is exposed to gradually increasing challenges until it masters more difficult tasks. This project proposes to apply curriculum learning to the environment developed by Pontes-Filho et al. to see if that increases the potential for to develop robot morphology and control.
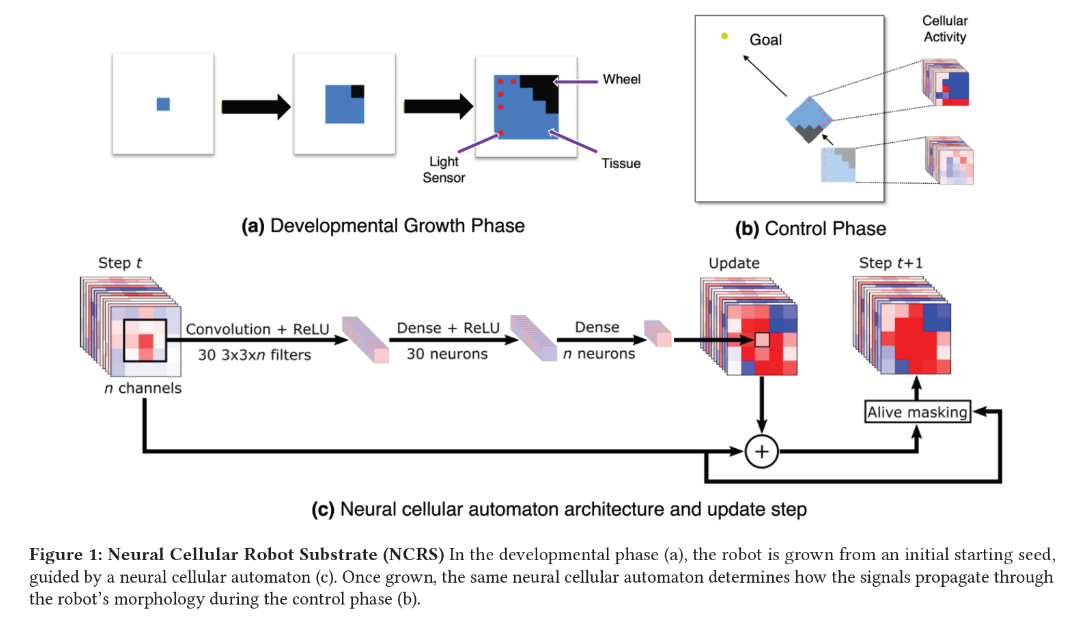
NCA for soft robot body and control, as proposed by Pontes-Filho et al. - Learning while growing up. Unlike robots, humans grow while learning to move around, allowing us to do a lot of our falling while having small bodies (helping us avoid falling very far, potentially damaging ourselves). Is this type of learning while growing essential for our ability to learn to walk? Could it be beneficial also for robots? One way to study this could be to evolve soft robots, starting from small initial designs towards larger and larger robots - can that be efficient and lead to less potential damages than starting from fully grown designs?
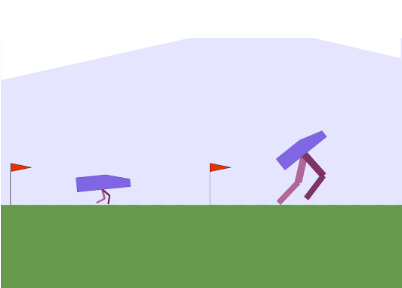
Learning to walk while growing up. Here shown on a rigid robot. But can it also make sense for a soft robot?